LoRaWAN
LoRaWAN is a low-power, wide area networking protocol built on top of the LoRa radio modulation technique.
It wirelessly connects devices to the internet and manages communication between end-node devices and network gateways.

LoRaWAN® Overview
The LoRaWAN® specification is a Low Power, Wide Area (LPWA) networking protocol designed to wirelessly connect battery operated ‘things’ to the internet in regional, national or global networks, and targets key Internet of Things (IoT) requirements such as bi-directional communication, end-to-end security, mobility and localization services.
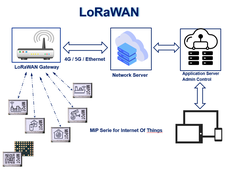
LoRaWAN® Topology
LoRaWAN® network architecture is deployed in a star-of-stars topology in which gateways relay messages between end-devices and a central network server.
The gateways are connected to the network server via standard IP connections and act as a transparent bridge, simply converting RF packets to IP packets and vice versa.
The wireless communication takes advantage of the Long Range characteristics of the LoRa physical layer, allowing a single-hop link between the end-device and one or many gateways.
All modes are capable of bi-directional communication, and there is support for multicast addressing groups to make efficient use of spectrum.
Benefits
o Low-cost deployment and operation
o Flexible deployment model
o Low power requirement, extended battery life (for the device) and allows use of various forms of energy harvesting
o Great coverage for IoT where speed and latency aren’t key requirements
o Wide range with ability to penetrate through obstructions for full coverage
LoRaWAN has three different classes of end-point devices to address the different needs reflected in the wide range of applications:
Class A – Lowest power, bi-directional end-devices:
The default class which must be supported by all LoRaWAN end-devices, class A communication is always initiated by the end-device and is fully asynchronous. Each uplink transmission can be sent at any time and is followed by two short downlink windows, giving the opportunity for bi-directional communication, or network control commands if needed. This is an ALOHA type of protocol.
The end-device is able to enter low-power sleep mode for as long as defined by its own application: there is no network requirement for periodic wake-ups. This makes class A the lowest power operating mode, while still allowing uplink communication at any time.
Because downlink communication must always follow an uplink transmission with a schedule defined by the end-device application, downlink communication must be buffered at the network server until the next uplink event.
Class B – Bi-directional end-devices with deterministic downlink latency:
In addition to the class A initiated receive windows, class B devices are synchronized to the network using periodic beacons, and open downlink ‘ping slots’ at scheduled times. This provides the network the ability to send downlink communications with a deterministic latency, but at the expense of some additional power consumption in the end-device. The latency is programmable up to 128 seconds to suit different applications, and the additional power consumption is low enough to still be valid for battery powered applications.
Class C – Lowest latency, bi-directional end-devices:
In addition to the class A structure of uplink followed by two downlink windows, class C further reduces latency on the downlink by keeping the receiver of the end-device open at all times that the device is not transmitting (half duplex). Based on this, the network server can initiate a downlink transmission at any time on the assumption that the end-device receiver is open, so no latency. The compromise is the power drain of the receiver (up to ~50mW) and so class C is suitable for applications where continuous power is available.
For battery powered devices, temporary mode switching between classes A & C is possible, and is useful for intermittent tasks such as firmware over-the-air updates.
Mipot is a LoRa Alliance member since 2017.